
Autonomous driving technology application value and its dilemma as well as the path
Abstract: From the perspective of technological level, terms such as unmanned and autonomous driving refer to the development process of intelligent vehicles and the level of development of autonomous driving technology in different countries at different times. The level of intelligent vehicle technology in research and development can be determined by the configuration level of devices such as controllers, sensors, and actuators during the corresponding period, including the intelligent judgment and situational cognition level to cope with complex and ever-changing situations. Especially important is the strength of the vehicle's information management ability in each period.
Keywords: autonomous driving; Application; Value; Difficulties; path
Introduction: autonomous vehicle is a complex intelligent transportation system combining computer and automobile technology, and is the main goal of future intelligent transportation tool development. From a technological perspective, the development of autonomous driving technology needs to combine advanced technologies such as modern sensing, data communication, and artificial intelligence to have a strong driving effect on the development of automotive technology; From an industry perspective, the automotive industry has been a key industry that has been competing with the world for a long time due to its high value chain, high correlation, and wide coverage; From a social perspective, the widespread application of self driving technology can not only improve individual modes of travel, but also reduce traffic accidents, improve the overall quality of social transportation, and rebuild the economic ecology of the industry. Therefore, the autonomous vehicle industry has become one of the best entry points for countries around the world to build a digital economy and an intelligent society.
1. Analysis of autonomous driving technology
Autonomous driving vehicles are a very complex system, and how to organically combine these components with software design and achieve safe driving in planning paths, speedometers, and other aspects is the key to solving these problems. The technologies required for this system mainly include environmental awareness, information integration, decision planning, and subsequent execution.
1.1 Environmental Awareness Technology
The core requirement of autonomous driving technology is that cars can replace human drivers to complete the driving tasks through computers. Therefore, in order to complete this function, autonomous cars themselves need to have the ability to recognize the environment. The cognitive ability of autonomous driving refers to the ability to recognize the surrounding environmental conditions near the car, such as the movement of other pedestrians, the layout of nearby building sites, and various traffic information, instructions, and the operating conditions of other cars.
To truly achieve the perception function of autonomous driving in cars, a large number of sensing devices are indispensable, and through this perception control system, the car can "see" the situation around it and perform corresponding actions at the same time. At present, the commonly used perception devices in cars are mainly divided into LiDAR sensors, image collectors, and GPS positioning systems. LiDAR sensors can quickly calculate the relative position between the car itself and other objects, thus enabling active obstacle avoidance and inertial navigation; The image collector collects image data around the car through the camera, thereby making analysis and judgment on the collected image data; The GPS positioning system can instantly grasp the geographical location of the car, thereby completing the navigation function. The fundamental problem of cognitive technology is to recognize external environmental information, thereby perceiving changes in the external environment. Currently, a large number of machine vision technologies, machine learning technologies, etc. have been applied in this field, and the recognition of environmental information provides a foundation for the next step of vehicle work (as shown in the figure below).
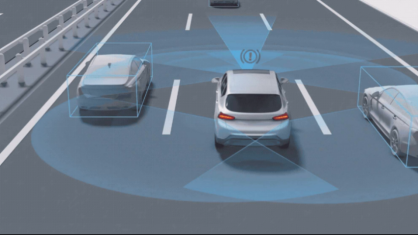
This image shows the autonomous driving of a car under environmental perception technology
1.2 Information fusion technology
During the process of driving, autonomous vehicles will receive a large amount of various forms of data, such as the speed and driving situation of surrounding cars, the movement of vehicles, and the height of nearby buildings. After understanding this data, it is necessary to integrate it, which poses the challenge of integrating multi-sensor data. Different sensors correspond to different environments and cognitive objects. Data integration through machine systems can effectively improve the stability of information systems, expand human cognitive functions, help people make decisions, and enhance problem-solving efficiency.
The process of data integration can be roughly divided into the following steps: the first step is to convert various information collected by each information system into digital signals using data conversion units for system management; Then preprocess this information to reduce noise impact and unify data types, etc; The next step is to extract feature data from the information, and based on the general rules of these feature data, perform comprehensive operations on the extracted feature information to obtain the results.
1.3 Decision Planning Techniques
When external signals are collected through sensors and fused, it is necessary to make reasonable decisions on these signals. In short, let the autonomous vehicle perform corresponding operations according to the signals received before. In terms of the decision-making and planning involved in autonomous vehicle, it can be roughly divided into two aspects: horizontal control and longitudinal control. Among them, horizontal control is to master the maximum speed of the car, how the car moves forward, and when to brake, while longitudinal control is to master the direction of the car, how the car changes lanes, and overtaking.
The decision-making of autonomous vehicles is closely related to computers. It must establish reasonable rules for drivers, including slowing down or giving way when pedestrians are detected, recognizing traffic signals, and making corresponding responses based on them. These are all very simple, but in real life, unmanned vehicles often encounter complex problems, such as how to solve pedestrians running red lights and how to surpass other vehicles. In order to cope with this complex environment, we need to classify different environments reasonably during the software design process, in order to develop a stable model suitable for different situations. In addition, deep learning technology based on neural networks also provides a feasible solution. Through the new generation of artificial intelligence technology, the ability to learn autonomously can be formed while fully understanding the road conditions, thus providing a practical foundation for achieving autonomous driving.
2. The application value of autonomous driving technology
With the increasing demand for vehicle active safety technology, intelligence and other technologies in the market, more companies are joining in and promoting the development of autonomous vehicles together. The biggest advantage brought by an autonomous ordinary car is that it can greatly save the time cost of the original driver. An ordinary car only travels for two hours a day, and most of the time is parked in the same place. Now, an autonomous car has replaced an ordinary car, saving more than two hours of driving time and providing more convenience for those who want to go out, This can save more time and money (as shown in the figure below).

This image shows the car driving in autonomous mode
3. The current difficulties in autonomous driving technology
Positioning is a problem in vehicle autonomous driving technology, because positioning technology is not only about positioning the car itself, but also requires some understanding of the corresponding situation around the car during driving. This positioning technology actually includes a sensing technology that uses sensing technology to locate the car. During the driving process of the car, the perception device collects environmental and road information, and then uses corresponding methods to make judgments on the perception data. Finally, the judgment data is transmitted to each controller, and the system executes commands to achieve autonomous driving. However, in the actual processing of vehicle positioning and perception technology, there are many uncertain factors that affect the information collection and evaluation of vehicle positioning and perception technology. For example, on highways in cities, it is found that the road surface is closed or new signs have been added. When driving on rural roads, it is found that due to narrow road surfaces, sharp turns, missing road signs, etc., these are all possible uncertainties in the driving path of cars, which are uncontrollable and unforeseeable by ordinary people, and there is a great deal of dynamism, which brings great technical difficulties to car positioning and perception. If the positioning and sensing capabilities of a car cannot meet the ideal conditions, then the stability of the car during autonomous driving cannot be improved, and commercial mass production cannot be carried out, which will also impose certain restrictions on the development of the autonomous driving car industry.
4. Optimization Path of Automotive Autonomous Driving Technology
With the further development of information technology, the improvement in positioning technology, cognitive technology, and computer science has brought more assistance to the improvement of the government's decision-making system. The decision-making judgment will also become more perfect, and the results of decision-making will become more accurate, creating favorable conditions for promoting the development of autonomous driving technology. For identification and classification, there are indeed considerable challenges, but neural networks trained to identify certain items in the real world can also be used. Through large-scale item identification, neural networks will remember the characteristics of these items and can also use methods such as association to learn and distinguish. Identification is crucial for diagnosing investment decision-making systems, and the earlier the timing of identification, the more favorable it is for the operation of later investment decisions, freeing up more time for later operations to make judgments. In order to improve identification and classification skills, in addition to regular practice, it is also necessary to classify infrequent items, continuously improve the database, and provide more reference basis for item identification and classification. After identification and analysis, it is necessary to grasp the actual condition of the item, which requires the integration of information through sensor technology to form a complete image record of the item. Therefore, when a vehicle is judged to be a bucket item due to obstacles in front of it during driving, it is necessary to know what material the bucket item is made of, whether it is empty or full. Once it passes, is there any reason that will affect the trajectory of the bucket item, and what kind of impact it will have on the car after a collision. After conducting a series of evaluations, the final decision can be made. In response to the above situation, it is recommended to use simulation methods of pedestrian trajectories for implementation, conduct scientific evaluations, and make reasonable policy judgments.
5. Future Development of Autonomous Driving Technology
Chinese vehicle manufacturers and spare parts companies carried out research and development on autonomous vehicle earlier. In terms of technology development, they adopted a relatively stable "gradual" path: early mainly focused on the research and application of ADAS, helping drivers to detect possible threats as early as possible and implement passive or active intervention, so as to enhance the sense of safety and initiative of driving. In the long term, this route will aim to pass through the various levels of manual driving required by the schedule and gradually transition to the high-level manual driving stage. The reason for choosing this route is that on the one hand, automotive and parts companies have rich technological accumulation and commercial practices in their products, and ADAS technology and products have unique resource advantages; On the other hand, ADAS technology can be integrated with the company's production and processes, thereby winning the benefits of technology and products for the company. Compared to traditional automotive companies, high-tech companies such as Google and Baidu often take a "radical" approach to autonomous driving technology: from the beginning, they are committed to developing more advanced autonomous driving technology to achieve rapid landing of unmanned driving. Google's technical experience is the most typical. At its inception, Google combined traditional precision mapping technology with various sensors, utilizing technologies such as deep learning and image recognition to achieve smart cars in the field of smart cars.
6. Conclusion
In summary, the implementation of autonomous driving technology must overcome a series of difficulties, and current technology must undergo long-term improvement to achieve complete autonomous driving. Whether it is the level of software and hardware technology of the vehicle itself, or the government's regulations on concepts and policies, it still needs to go through a long period of accumulation. Before and after the development of autonomous vehicle, they also need to go through a lot of testing and certification, so we need to divide and rule in the face of autonomous driving, first overcome the technical problems in each link, and then integrate to achieve the desired results.
References
[1] Xia Xuan. Latest Development of autonomous vehicle Technology [J]. New Economy Guide, 2015 (7): 24-27
[2] Chen Kewen, Zhang Zuping, Long Jun. Key issues, research progress, and new trends in multi-source information fusion [J]. Computer Science, 2013,40 (8): 6-13
[3] Wang Yuangui, He Huan. The Impact of Artificial Intelligence 2.0 on the Development of Autonomous Driving [J]. Modern Telecom Technology, 2017,47 (4): 20-24
[4] Wang Kejun, Zhao Yandong, Xing Xianglei. Research progress on the application of deep learning in the field of autonomous vehicles [J]. Journal of Intelligent Systems, 2018,13 (01): 55-69











